Vision and Mission
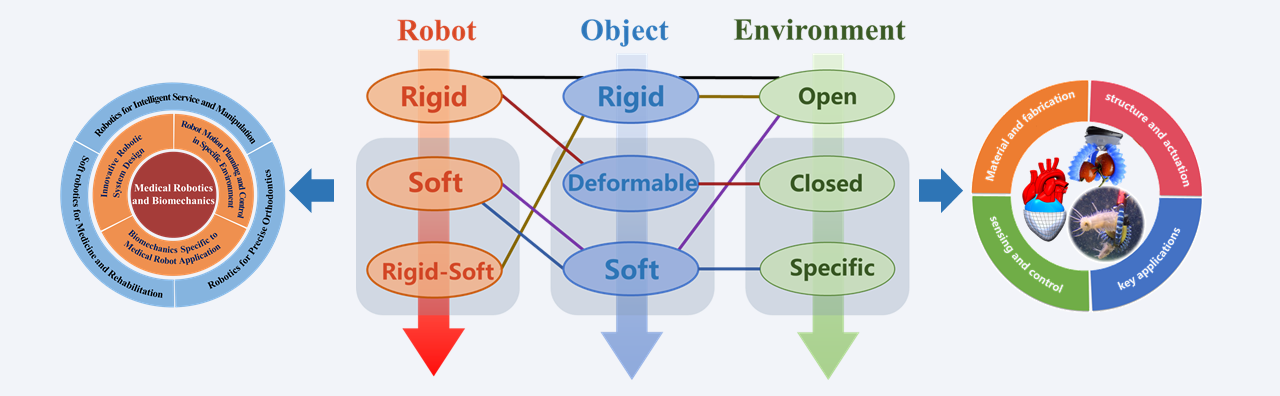
Oriented to the frontier science and key applications of soft robotics, Soft Robotics Research Center focuses on the fundamental theories and critical technologies of soft robotics. The major aspects include its material and fabrication, structure and actuation, sensing and control, and key applications. The research center is devoted to significant innovations of science and industrialization of applications on soft robotics, and particularly on the soft medical robots, soft manipulation, and underwater soft robots. The research center has also carried out theoretical and technological innovation researches in the field of medical robots and biomechanics, multi-model robotic manipulation, and many achievements have entered the application stage.
Main Research Directions
Direction I: Fundamental Theories, Critical Technologies and Key Applications of Soft Robotics
Soft robotics is a kind of robots made of soft materials, which is characterized by using the flexibility and malleability of materials to achieve large deformation, so as to realize the functions of manipulation and interaction. Our research focuses on the critical technologies of soft robotics, including its material and fabrication, structure and actuation, sensing and control, and key applications. and is devoted to realize significant innovations of science and industrialization of applications, particularly on the soft medical robots, soft manipulation, and underwater soft robots.

Direction II: Medical Robots and Biomechanics
Robotic Assistance for Precision Orthodontics and Biomechanics
Current clinical orthodontic treatment over relies on the experience of the clinicians, which results in unsatisfied treatment outcomes, over long treatment duration, and high cost of the clinical treatments. The key reason is that it is difficult to realize precision treatment prediction, customized application preparation, and precision clinical operation.

Direction III: Multi-model Robotic Manipulation
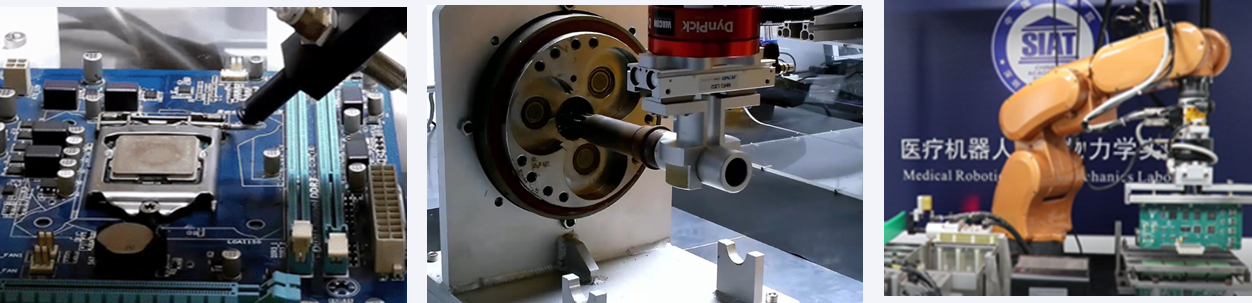
Robotic Accurate Perception, Recognition and Complex Data Fusion and Its Applications
Although there is more than 100 billion market of robots in China, the current share of domestic robots is few. This project aimed to address challenges of accurate perception, recognition and complex data fusion technology of industrial robot arms, and to develop and industrialize robotic preparation systems with high precision, intelligence, accurate perception and motion control.
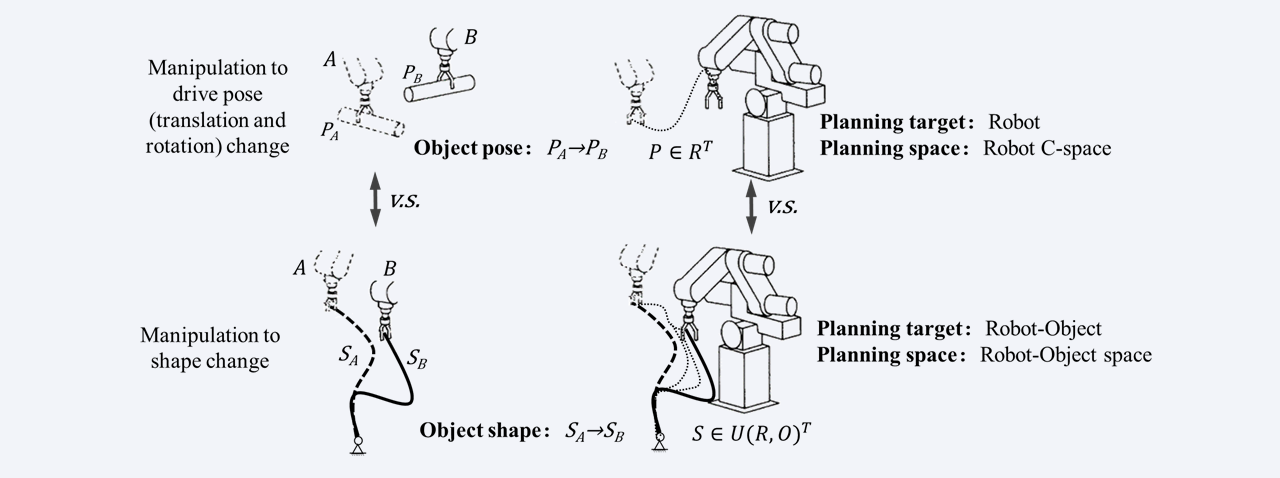
Modeling, Planning and Control for Robotic Manipulation
Existing robotic manipulation aims to drive the change of the position and posture of the object, while recently many industrial and national defence fields and cutting-edge research fields demand a new task, robotic manipulation to drive deformation of the object, which realizes specific function due to the object formation or distribution. However, existing robotic manipulation planning method does not consider the constraints caused by the characters and process of the object deformation, thus is not applicable to the new robotic manipulation task. Therefore, our research proposes to study a modelling and planning approach to robotic manipulation to drive object deformation.