Project Details
Robotic System for the Active Rehabilitation of Upper-limb Movement Functions
Project type: Inter-governmental Cooperative Science and Technology Project, Ministry of Science and Technology, China Project investigator: Dr. Zeyang Xia
Project period: 2017-2019 Total funding: RMB 2,382,000
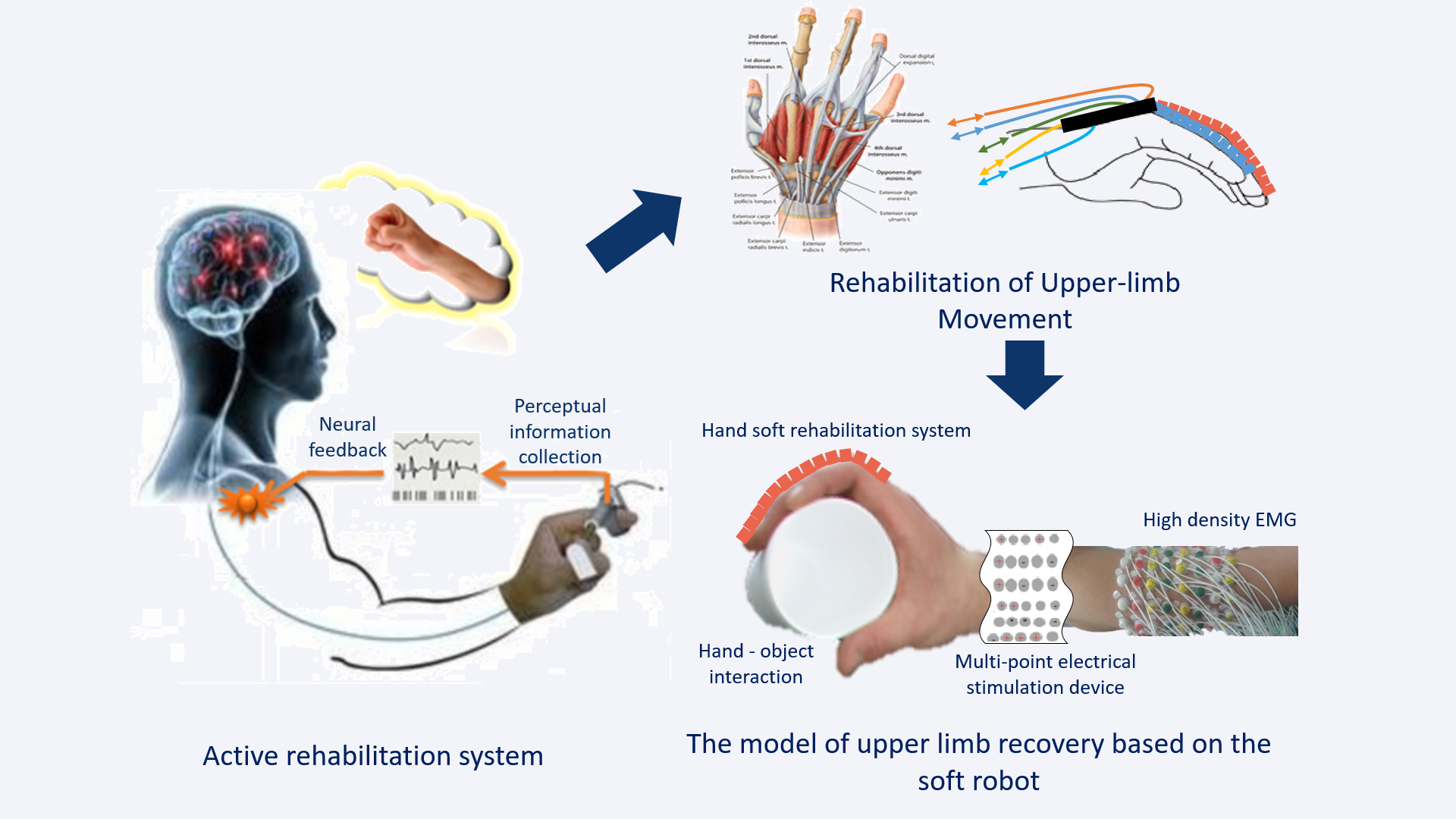
This project aimed to develop a wearable upper-limb skeleton robotic system with three degrees of freedom (DOF) movements for the people with arm/hand movement disorders (such as post-stroke patients) to actively do rehabilitation training for the recovery of their motion functions.
The contents include:
(1) to develop a movement identification approach to decode the user’s intention based on pattern recognition,
(2) to study the transcutaneous electrical nerve stimulation based neural feedback of touch sense for the user to implement arm/hand movement with touch sense,
(3) to investigate the proper training mode and the evaluation of function rehabilitation for users by using the robotic system,
(4) to study the mechanism of neural plasticity during rehabilitation training based on the changes of electroencephalography and electromyography signals as well as functional magnetic resonance imaging.
The research outcome will benefit hundreds of thousands of upper-limb movement disorders, thus the project is of great social significance and potential economic value.