Project Details
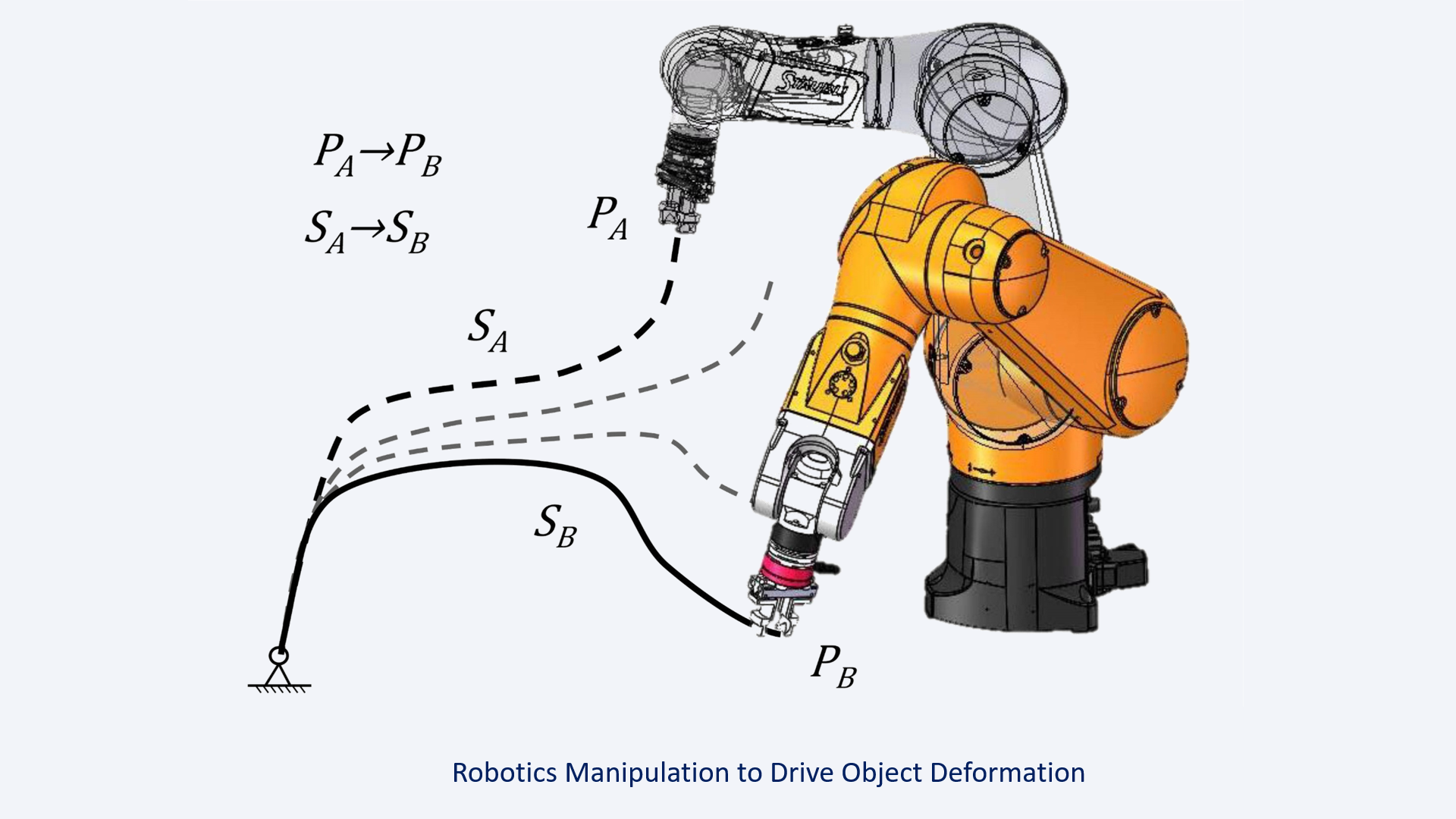
Integrated Modeling and Planning for Robotics Manipulation to Drive Object Deformation
Project type: National Natural Science Foundation of China Project investigator: Dr. Zeyang Xia
Project period: 2018-2021 Total funding: RMB 650,000
Existing robotic manipulation aims to drive the change of the position and posture of the object, while recently many industrial and national defence fields and cutting-edge research fields demand a new task, robotic manipulation to drive deformation of the object, which realizes specific function due to the object formation or distribution. However, existing robotic manipulation planning method does not consider the constraints caused by the characters and process of the object deformation, thus is not applicable to the new robotic manipulation task. Therefore, this research proposes to study a modelling and planning approach to robotic manipulation to drive object deformation.
Studies on modelling, planning, and validation will be conducted, including:
(1) modelling of deformable objects towards robotic manipulation using generalized structural elements and algorithms of model regeneration of the deformed objects;
(2) construction of the integrated planning space consisting of the state of both the deforming object and the robot, and planning of object deformation process and the robot manipulation in this space,
(3) validation of the above-mentioned methods using both simulation and hard robotic system with real manipulation tasks.
Construction of modelling and planning approach to robotic manipulation to drive object deformation will support and promote its innovative application, thus has distinct significance.