愿景与使命
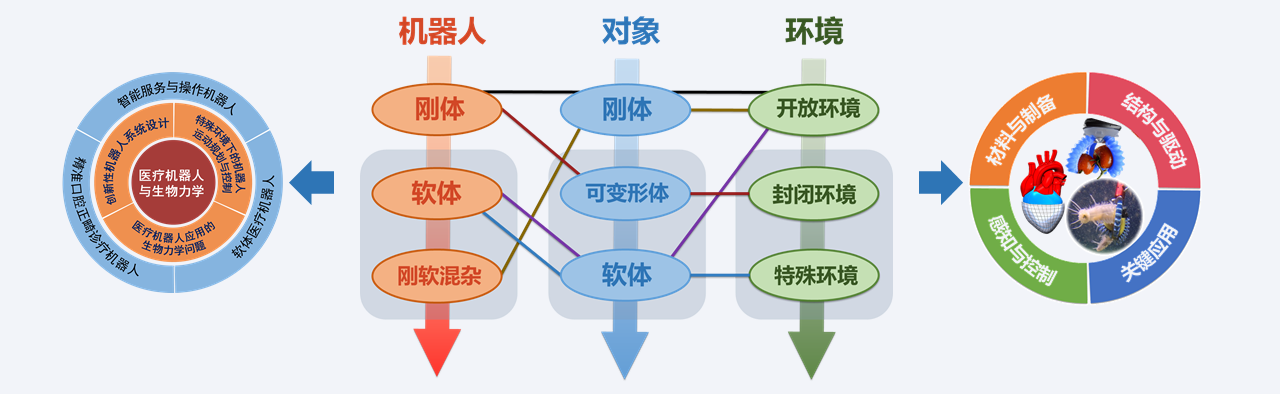
中国科学院深圳先进技术研究院软体机器人研究中心面向软体机器人前沿科学和重大关键应用,致力于开展软体机器人的材料与制备、结构与驱动、感知与控制等基础理论与关键技术研究,以软体医疗机器人为特色,同时布局软体操作机器人及水下软体机器人等应用方向,最终实现软体机器人的重大科学创新和重大应用落地。中心也在医疗机器人与生物力学的交叉、多模机器人操作等领域进行理论及技术创新性的研究,多项成果进入应用阶段。
主要研究方向
研究方向一: 软体机器人基础理论、关键技术及重大应用
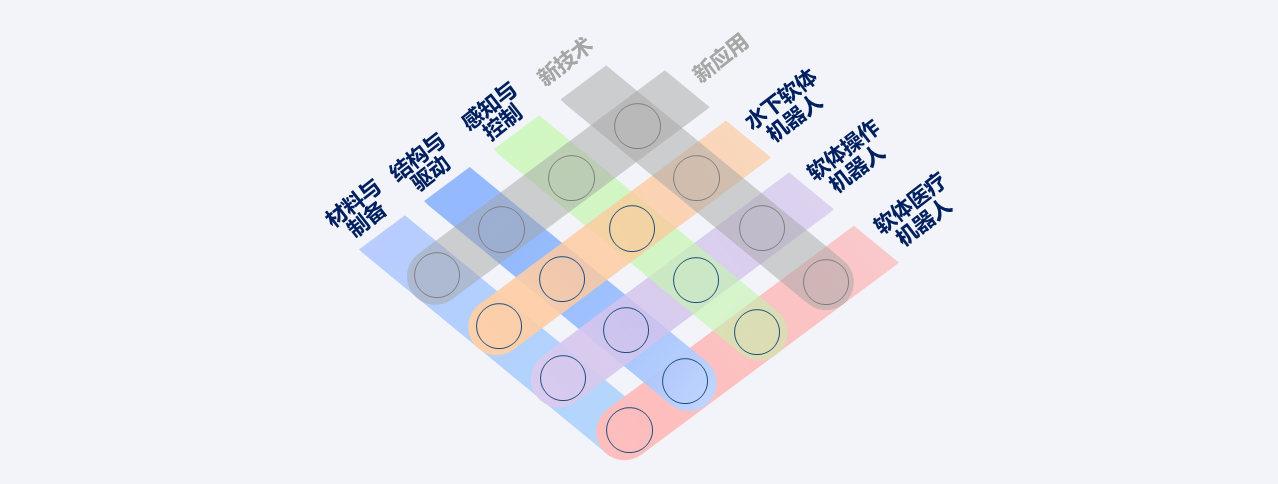
软体机器人是一类基于软材料的机器人,其特点是利用材料自身的柔顺性及延展性来实现大形变,以实现操作与交互功能。研究软体机器人的材料与制备、结构与驱动、感知与控制等基础理论与关键技术,实现软体医疗机器人、软体操作机器人及水下软体机器人三个方向上的重大应用。
研究方向二: 医疗机器人与生物力学
精准口腔诊疗机器人与生物力学
传统口腔正畸基于“试错”的经验治疗模式缺乏可预测性。研究提出基于口腔生物力学模型的治疗模拟、个性化娇治器机器人制备和精准加载方法,推动临床口腔正畸诊疗从经验模式提升到精准模式,最终实现个性化、可预测的精准口腔正畸治疗。

研究方向三: 多模机器人操作
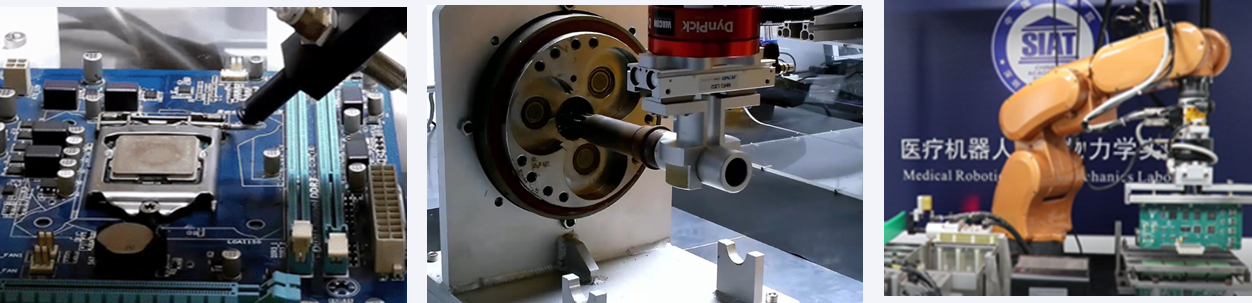
机器人精准感知、识别与复杂信息融合技术及其应用
我国拥有千亿的机器人市场,但国产机器人所占份额极少。本研究旨在解决目前工业机械臂缺乏精准感知、识别及复杂信息融合技术的现状,建立高精度智能感知与控制的智能机器人系统并带动其产业化。
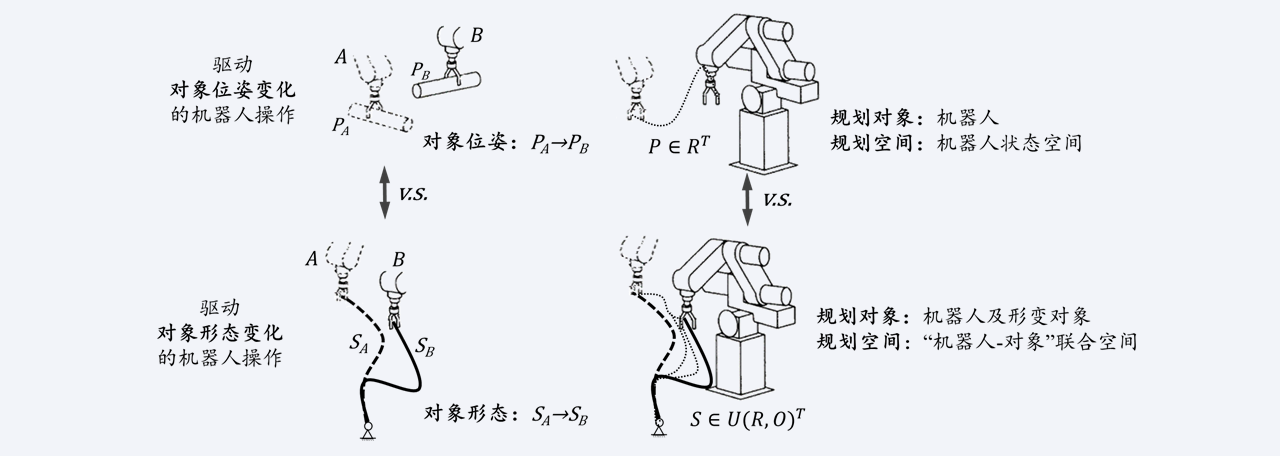
机器人操作建模、规划与仿真
目前机器人操作多以驱动对象的位姿变化为目标,以驱动对象的形态变化为目标的任务是机器人操作新问题。研究建立驱动对象形态变化的机器人操作的联合建模及规划方法,为其创新应用奠定理论及方法基础。