专利
已授权发明专利
一种双臂机器人穿刺系统标定方法及系统, ZL 202110324432.8
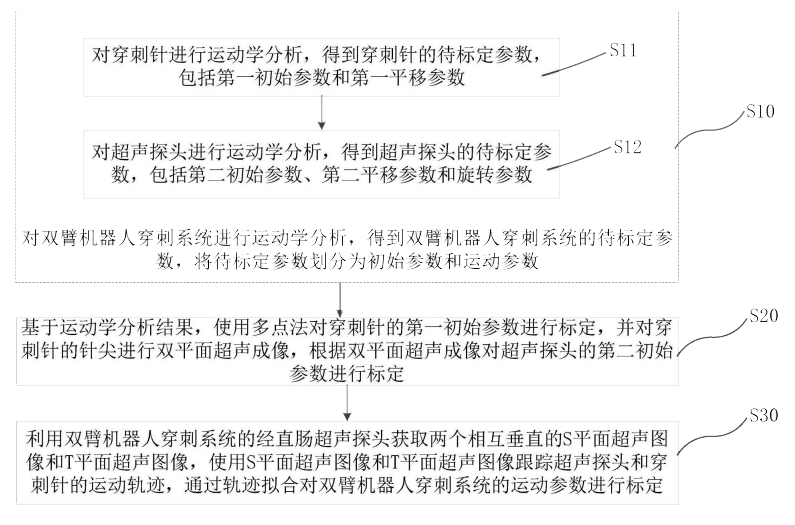
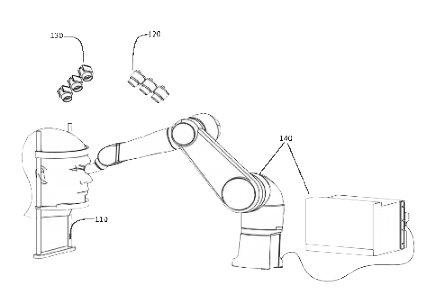
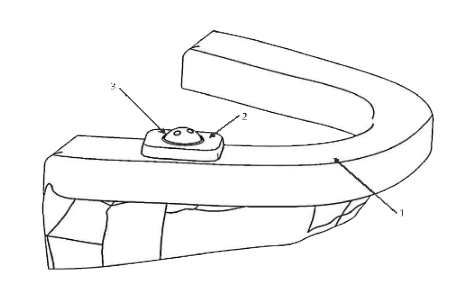
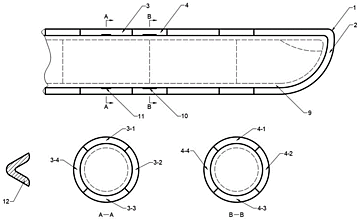
摘要: 本申请涉及一种双臂机器人穿刺系统标定方法及系统。包括:对双臂机器人穿刺系统进行运动学分析,得到所述双臂机器人穿刺系统的待标定参数;使用多点法对穿刺针的第一初始参数进行标定,并对所述穿刺针的针尖进行双平面超声成像,根据双平面超声成像对所述超声探头的第二初始参数进行标定;利用所述超声探头获取两个相互垂直的S平面超声图像和T平面超声图像,使用所述S平面超声图像和T平面超声图像分别跟踪超声探头和穿刺针的运动轨迹,并通过轨迹拟合对所述第一平移参数、第二平移参数和旋转参数进行标定。本申请实施例能够高效地对双臂机器人穿刺系统的穿刺针和经直肠超声探头同时进行标定,且无需采用第三方跟踪设备。
一种用于眼睛清洗的眼睑翻开软体机器人及方法, ZL 202110161526.8
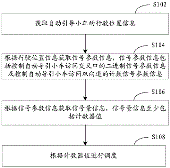
摘要: 本发明公开一种用于眼睑翻开的软体装置及方法。该装置包括:头部支撑模块、眼睑实时定位模块、机器人末端执行器实时定位模块和眼睑自动翻开操作模块,头部支撑模块用于支撑用户的头部;眼睑实时定位模块实时识别与定位用户的上下眼睑的实时位姿;机器人末端执行器实时定位模块用于重构机器人软体末端执行器的实时形态和位姿;眼睑自动翻开操作模块包含机器人本体和机器人控制系统,机器人本体设置多轴刚体机械臂和软体末端执行器,机器人控制系统以用户上下眼睑实时位姿为运动目标、以软体末端执行器实时形态和位姿作为反馈信息控制机器人本体运动,以自动翻开眼睑。本发明能够保证用户舒适性和安全的前提下,快速、精准自动完成眼睑翻开操作。
一种根管治疗导板及其制备方法, ZL 202010700610.8
摘要: 本发明提供一种根管治疗导板及其制备方法。该根管治疗导板包括基座、设置在基座上的导向座和安装在导向座上的导向装置,其中,所述基座在治疗过程中与患牙贴合固定,所述导向座和所述基座通过定位连接结构连接,所述导向装置上设置根管导向通道,所述导向装置根据患牙的根管通道方向安装在所述导向座上,并且在治疗过程中通过适应性调节根管导向通道的方向和位置来引导根管治疗器械经由根管导向通道对患牙根管进行定位。本发明提供的根管治疗导板,在导板通道与根管通道进行匹配的过程中能够进行适应性微调,从而提高了患牙根管的定位精度。
一种手部功能康复训练的软体机器人手套及控制方法, ZL 201910536347.0
摘要: 本发明提供一种手部功能康复训练的软体机器人手套及控制方法。该手套包括手掌部分和多个手指部分,每个手指部分的内外表面之间包含内腔结构,该内腔结构根据手指特征分为非关节处内腔结构和关节处内腔结构,并且在所述非关节处内腔结构和所述关节处内腔结构中分别独立设置用于控制内腔形变的执行部位。本发明的软体机器人手套和控制方法能够灵活精确地控制手指每个关节的动作以及与手套的贴合程度,提高了佩戴者的舒适度和康复训练效果。
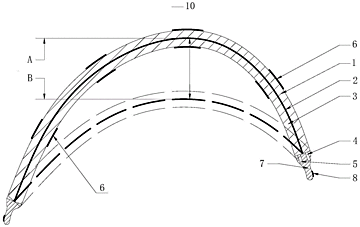
一种膈运动辅助装置及膈运动辅助系统, ZL 201910163929.9
摘要: 本发明适用于医疗器械技术领域,提供了一种膈运动辅助装置及膈运动辅助系统,该膈运动辅助装置包括隔离层,以及层叠设置于所述隔离层的两相对表面的第一驱动层和第二驱动层,所述第一驱动层、第二驱动层和所述隔离层连接在一起形成三层结构体,所述第一驱动层、第二驱动层和隔离层均为弹性体,所述第一驱动层和第二驱动层内部均具有用于容纳流体的容纳腔且用于随着所述容纳腔内流体压力的改变实现各项异性变形。本发明设计了一种仿生膈运动辅助装置,其为患者提供呼吸辅助的方案,实现对人体膈肌运动功能的辅助或代替,帮助患者进行自由呼吸,并且通过被动辅助膈肌运动,可以为膈肌萎缩患者提供运动康复支持,其适用范围广。
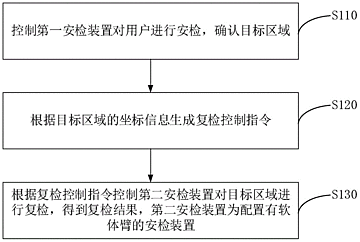
安检方法、装置、设备以及存储介质, ZL 201811435872.5
摘要: 本发明实施例提供了一种安检方法、装置、设备以及存储介质,该安检方法包括:控制第一安检装置对用户进行安检,确认目标区域;根据目标区域的坐标信息生成复检控制指令;根据复检控制指令控制第二安检装置对目标区域进行复检,得到复检结果,第二安检装置为配置有软体臂的安检装置。本发明实施例可以实现近距离接触式安全检测,并且减少人工作业工作量的同时,有效提高安检效率和安检口的通行效率。

柔性手术器械跟踪方法、装置、设备及存储介质, ZL 201711364739.0
摘要: 本发明适用医疗器械技术领域,提供了一种柔性手术器械跟踪方法、装置、设备及存储介质,该方法包括:根据当前时刻的手术图像,将柔性手术器械末端所在的、手术视野边缘的局部跟踪区域设置为当前局部跟踪区域,获取下一时刻的手术图像,以检测柔性手术器械末端在当前局部跟踪区域内的当前位置,根据当前位置获取柔性手术器械的移动轨迹并输出,若当前位置位于当前局部跟踪区域的边缘,则将在手术视野中拓展的下一局部跟踪区域设置为当前局部跟踪区域,若当前位置到达手术视野中的预设位置,则结束对柔性手术器械的跟踪,否则继续获取下一时刻的手术图像,从而有效地提高了柔性手术器械跟踪的效率和定位精度,保证了柔性手术器械跟踪的实时性。
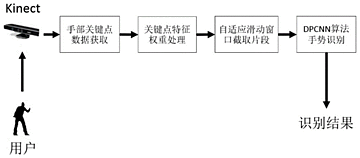
增强现实环境下控制手势识别方法与系统, ZL 201711100432.X
摘要: 本发明提供了一种增强现实环境下控制手势识别方法,包含以下步骤:数据获取步骤:根据通过深度摄像头跟踪获取人手部的深度数据,计算手部关键点的三维坐标,来获取手部关键点的运动特征序列;神经网络处理步骤:对手部关键点的运动特征序列进行跟踪与识别,获得手势的特征序列;手势识别步骤:根据手势的特征序列,获得手势识别结果。相应地,本发明还提供了一种增强现实环境下控制手势识别系统。本发明可以对手势进行准确并快速的识别,减少了资源占用,提高了鲁棒性和实时性。
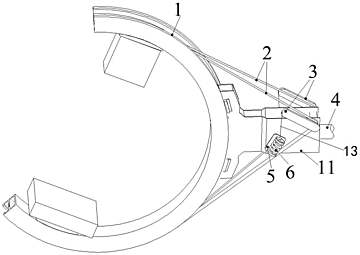
一种C形臂的自动平衡装置和自动平衡方法, ZL 201711092786.4
摘要: 本发明适用于具有C形臂的X光机技术领域,公开了一种C形臂的自动平衡装置和自动平衡方法。自动平衡装置包括可绕旋转轴转动且滑动连接于支架的C形臂,支架转动连接有摆杆装置,摆杆装置与C形臂之间连接有用于使摆杆装置与C形臂具有相同的旋转角度的同步传动件,摆杆装置与支架之间连接有恒力部件;恒力部件连接有用于驱动恒力部件转动的转动驱动部件。自动平衡方法,采用上述的自动平衡装置。本发明所提供的一种C形臂的自动平衡装置和自动平衡方法,可以产生与不利转矩时时大小相等、方向相反的平衡转矩,可以保证C形臂的运动过程平稳可靠,X光机成像质量佳,且结构简单可靠,易于推广使用。
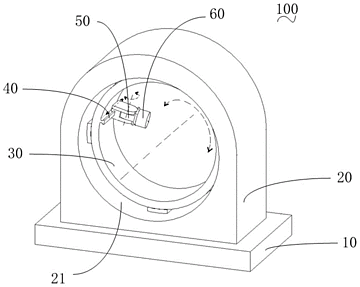
放射治疗装置, ZL 201611040617.1
摘要: 本发明公开了放射治疗装置,包括固定支架、旋转支架、移动机构、摆动机构和放射源,旋转支架为中空圆筒状;旋转支架可旋转地设置于固定支架上,移动机构设置于旋转支架的内壁上,放射源通过摆动机构设置于移动机构上;旋转支架用于带动移动机构相对固定支架旋转;移动机构用于带动摆动机构和放射源直线移动;摆动机构用于带动放射源转动。本发明的放射治疗装置,可以快速、灵活且准确地对放射源发出的射线进行定位,提高了放射治疗的效率;而且放射源可以实现三自由度运动,得到锥形状放射域放射治疗,使癌细胞周围的健康细胞可以分担放疗损伤,减少了对病人造成的身体损伤。
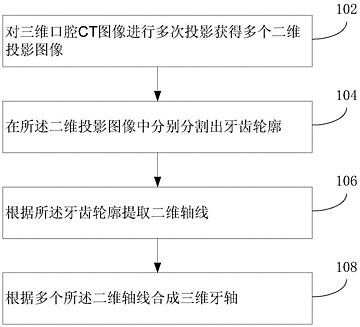
一种估算三维牙轴的方法和装置, ZL 201610729405.8
摘要: 本申请公开了一种估算三维牙轴的方法,包括:将三维口腔CT图像转换为多张二维投影图像,根据所述二维投影图像提取三维牙轴。本申请还公开了一种估算三维牙轴的装置。在本申请的具体实施方式中,由于将三维口腔CT图像转换为多张二维投影图像,根据二维投影图像提取三维牙轴,本申请综合考虑了牙冠和牙根信息,只需要对每颗牙齿在多张二维投影图像上进行轮廓分割,无需在患者口腔CT图像中进行完整牙齿的分割,牙轴估算效率更高。同时,由于二维投影图像上牙根与牙槽骨的差异比原始的口腔CT图像中两者的差异更明显一些,牙齿轮廓分割更加容易,且估算的三维牙轴也更准确。
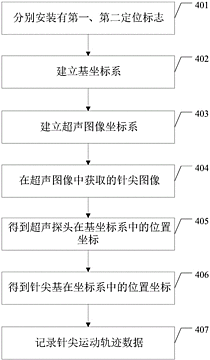
一种柔性穿刺针针尖自动跟踪装置及方法, ZL 201610710312.0
摘要: 本发明涉及医疗辅助设备领域,具体涉及一种柔性穿刺针针尖自动跟踪装置及方法,本发明包括:定位机械臂,超声探头、数据处理设备、光学测量仪和定位标志;该定位标志分别固定安装于被穿刺对象上和超声探头上;光学测量仪对定位标志进行测量,得到光学测量数据;所述数据处理设备通过光学测量数据与超声图像数据相结合得到针尖在基坐标系中的针尖位置坐标;对所有针尖位置坐标进行记录,得到当前时刻的针尖运动轨迹数据。本发明利用超声成像与光学定位相结合的方法进行定位跟踪,其具有定位精度高的优点,对针尖位置实现自动实时监控跟踪,给临床手术带来了方便。
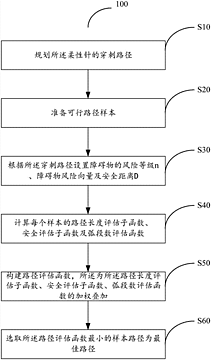
一种柔性针穿刺路径评估方法及系统, ZL 201610349546.7
摘要: 本发明提供的柔性针穿刺路径评估方法和系统,包括评估子函数、权重向量和障碍物风险向量,评估子函数中基于路径样本数据对路径长度、弧段数和安全度无量纲归一化处理;权重向量作为评估子函数的系数,调节各子函数对评估函数计算结果的影响称度,在评估子函数归一化的基础上权重向量的各元素数值具有可对比性;障碍物风险向量作为安全度评估子函数的系数,用于设定环境中各障碍物的危险等级,从而影响安全度子函数的计算结果。路径评估函数由评估子函数加乘权重向量和障碍物风险向量叠加,评估函数计算结果数值越小,路径越优。医生根据环境特征和临床经验对权重向量和障碍物风险向量进行调节,从而影响路径选择结果,使规划路径更为合理。
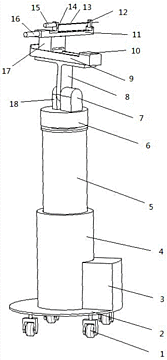
一种立式移动穿刺机器人, ZL 201510955237.X
摘要: 本发明提供一种立式移动穿刺机器人,包括:升降机构与旋转机构连接,升降机构安装于底盘平台上,旋转机构安装在升降机构顶端,倾斜角度调节机构安装在旋转机构上;或,旋转机构安装于底盘平台上,升降机构安装在旋转机构顶端,倾斜角度调节机构安装在升降机构上;升降机构用于通过升降对穿刺位置的高度进行调整;旋转机构用于通过水平旋转对倾斜角度调节机构、平移机构和穿刺执行机构的周向角度进行调节;倾斜角度调节机构用于对穿刺位置的倾斜角度进行调节;平移机构安装在倾斜角度调节机构上,用于对穿刺执行机构的水平位置进行调整;穿刺执行机构安装在平移机构上,用于进行穿刺操作。通过本发明能够实现多角度和多方式的穿刺,定位精度高。
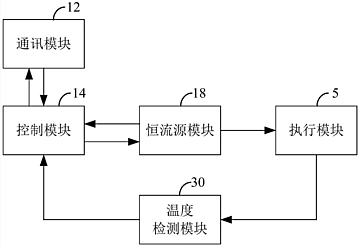
口腔正畸弓丝成型装置及其控制方法, ZL 201510493082.2
摘要: 本发明涉及口腔治疗技术领域,本发明提供一种口腔正畸弓丝成型装置及其控制方法,口腔正畸弓丝成型装置包括控制模块、恒流源模块、温度检测模块,通讯模块以及执行模块;控制模块通过所述通讯模块与上位机进行通讯,以获取对弓丝的加热温度参数,温度检测模块检测弓丝的加热温度值,并将实时的加热温度值发送给控制模块;在对弓丝加热的过程中,控制模块根据恒流源模块的输出电流值和加热温度值调整恒流源模块的输出电流值,以调节弓丝的加热温度,并不断的采集输出电流值和弓丝的温度值,能够准确控制加热工艺条件,实现了对弓丝加工的精确控制,避免每次加热操作的手工设定操作,以及欠加热和过加热等情况的发生。
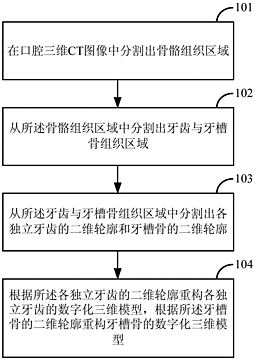
牙齿和牙槽骨的分割与重构方法及装置, ZL 201580000447.1
摘要: 一种牙齿和牙槽骨的分割与重构方法及装置,其中,该方法包括:在口腔三维CT图像中分割出骨骼组织区域(101);从骨骼组织区域中分割出牙齿与牙槽骨组织区域(102);从牙齿与牙槽骨组织区域中分割出各独立牙齿的二维轮廓和牙槽骨的二维轮廓(103);根据各独立牙齿的二维轮廓重构各独立牙齿的数字化三维模型,根据牙槽骨的二维轮廓重构牙槽骨的数字化三维模型(104)。该方案可以实现同时分割出各独立牙齿的二维轮廓和牙槽骨的二维轮廓,进而实现根据各独立牙齿的二维轮廓重构各独立牙齿的数字化三维模型,根据牙槽骨的二维轮廓重构牙槽骨的数字化三维模型,以利于实现数字化的正畸治疗辅助。

一种新型口腔正畸力测量方法, ZL 201410789525.8
摘要: 本发明适用于口腔正畸力测量技术领域,公开了一种新型口腔正畸力测量方法及装置。新型口腔正畸力测量方法,包括以下步骤:制备待测牙模、将待测牙模固定于支撑台,驱动部件驱动多维力传感器使多维传感器与所述牙模相接,且待测牙模由牙齿、牙周膜和牙槽骨组成。测量装置包括支撑底座、多维力传感器和用于固定待测牙模的支撑台,多维力传感器连接有驱动部件。本发明所提供的新型口腔正畸力测量方法及装置,测量的是经牙齿与牙槽骨之间的牙周膜传递的正畸力与力矩,通过利用六维力传感器测量正畸力与力矩,并考虑了牙周膜形变对实际正畸力的影响,可简易快速、准确得到口腔正畸过程中的力与力矩,提高了测量结果的可信度,更具有参考价值。
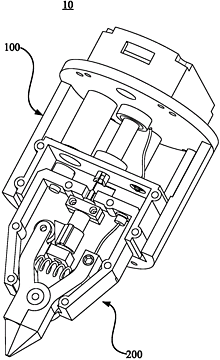
口腔正畸器械制备机器人及其机械手, ZL 201410083066.1
摘要: 一种机械手,包括接收机构及末端执行器。接收机构及末端执行器上分别设置有安装电磁铁及定位铁块,需要将末端执行器安装于接收机构上时,接收机构对准末端执行器,末端执行器的壳体收容于连接壳内,安装电磁铁通电后与定位铁块相吸附,以使末端执行器相对接收机构固定。需要使用其它型号的末端执行器时,安装电磁铁断电并失去磁性,末端执行器即可从接收机构上脱出,再通过相同的安装过程将其它型号的末端执行器安装于接收机构上。整个更换过程实现了自动化,提高了制备正畸弓丝的效率。同时还提供了一种使用上述机械手的口腔正畸器械制备机器人。
自动导引小车调度方法和系统, ZL 201310452904.3
摘要: 本发明提供了一种自动导引小车调度方法,所述方法包括:获取自动导引小车的行驶位置信息;根据所述行驶位置信息获取信号参数信息,所述信号参数信息包括控制自动导引小车访问交叉口的二进制信号参数信息及控制自动导引小车访问双向道的计数信号参数信息;根据所述信号参数信息获取信号量信息,所述信号量信息至少包括计数器值;根据所述计数器值进行调度。此外,还提供了一种自动导引小车调度系统。采用该方法能有效地解决冲突和死锁问题,同时提高了效率。
刷卡机及停车场闸机系统, ZL 201310447047.8
摘要: 一种刷卡机,包括底座、移动平台、第一电机、支撑滑块、第二电机及主机体;所述底座上设置有导轨;所述移动平台可滑动地设置于所述导轨上;所述第一电机设置于所述底座上,用于带动所述移动平台在所述导轨上滑动;所述支撑滑块可滑动地设置于所述移动平台上,且与所述移动平台的滑动方向相垂直;所述第二电机设置于所述移动平台上,用于带动所述支撑滑块在所述移动平台上滑动;所述主机体内设置有用于发卡和/或读卡的发卡/读卡模块,所述主机体固定于所述支撑滑块上。同时还提供了一种使用上述刷卡机的停车场闸机系统。上述刷卡机及停车场闸机系统具有方便驾驶者刷卡或取卡的特点。
可限力牙刷, ZL 201310447044.4
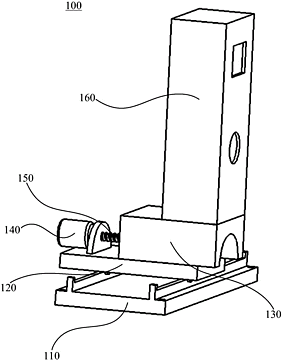
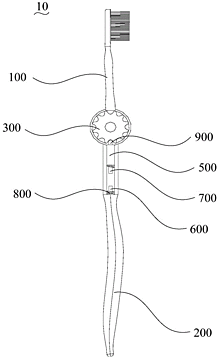
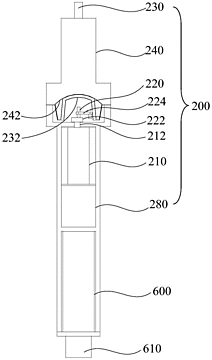
摘要: 本发明涉及一种可限力牙刷,包括刷头、刷柄、传动机构、壳体、从动杆及抵接柱;传动机构包括本体、旋转轮及棘爪;本体包括与刷头连接的连接板及分别设于连接板的相对的两侧上的第一固定板及第二固定板;旋转轮的外周缘上设有圆弧槽,旋转轮位于第一固定板及第二固定板之间,并固定于第一固定板上,能在本体内旋转;棘爪固定于第二固定板的表面上,用于驱动旋转轮旋转;壳体包括底板及与刷柄连接的凸缘部,第二固定板固定于底板上,且本体能在壳体内旋转;从动杆容置于设于刷柄的一端的刷柄腔内,其远离刷头的一端与刷柄腔的底部弹性连接;抵接柱设于从动杆靠的一端上,并贯穿凸缘部,与圆弧槽的槽底抵接。上述可限力牙刷可以限制最大刷牙力度。
振动器, ZL 201310447058.6
摘要: 一种振动器,用于加速口腔正畸治疗,包括振动组件,振动组件包括动力输出轴、偏心件、振动杆及导轨;偏心件与动力输出轴连接,且偏心件的轴线与动力输出轴的轴线之间存在偏心距;振动杆与偏心件连接,振动杆与偏心件连接的一端设有第一圆弧部;导轨套设在振动杆上,且导轨靠近偏心件的一端设有第二圆弧部,第二圆弧部与第一圆弧部平行设置,且第二圆弧部覆盖第一圆弧部;当振动器工作时,动力输出轴带动偏心件旋转,偏心件带动振动杆振动,第一圆弧部在第二圆弧部内做往复振动。上述振动器具有确定振动方向,在已有器械施加正畸力的基础上,额外对牙齿施加与牙齿移动方向一致的振动载荷能有效加快牙齿的移动速度,从而缩短口腔正畸治疗的时间。